Hardware-in-the-Loop Simulation (HILS) System for UAV Development
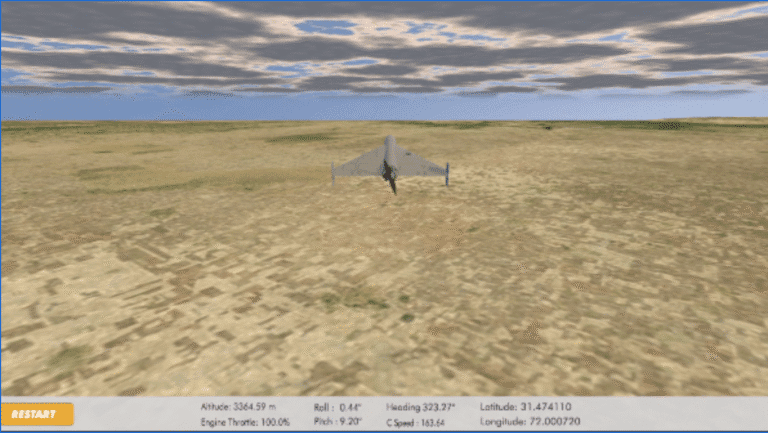
We designed and developed a real-time Hardware-in-the-Loop Simulation (HILS) platform to validate and verify Flight Control Computer (FCC) hardware in a fully closed-loop environment before live flight deployment.
The system simulates the complete UAV operational stack, including:
- 6-DOF airframe dynamics
- Propulsion system behavior
- IMU, GPS, and Air data sensors
- Actuator and servo responses
- Environmental disturbances such as wind, turbulence, and gusts

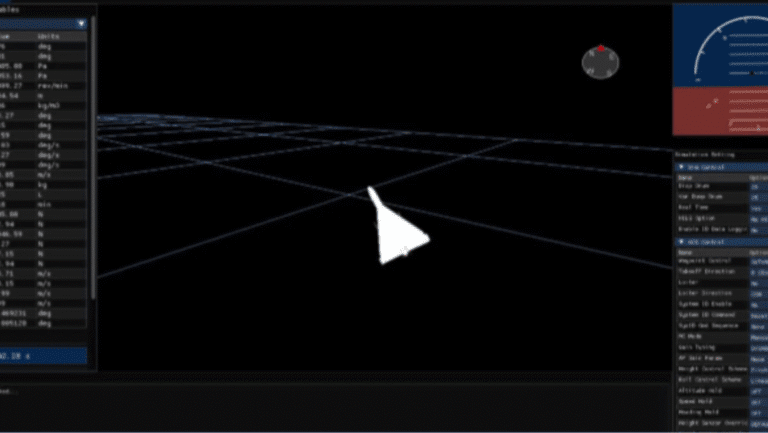
The FCC hardware connects directly to the simulator. Simulated sensor data is transmitted to the controller, and actuator outputs are fed back into the simulation engine, forming a real-time deterministic control loop.
Key Capabilities
- Deterministic real-time execution
- Sensor noise, bias, and drift simulation
- Control law tuning (roll, pitch, yaw loops)
- Guidance and navigation validation
- Fault injection and stress testing
- Extreme-condition scenario evaluation
- Performance logging and telemetry analysis
This platform enables:
- Early-stage control algorithm validation
- Autopilot stability assessment
- Lateral and longitudinal controller optimization
- Off-track error and overshoot reduction
- Mission logic verification
By allowing exhaustive ground-based testing, the HILS system significantly reduces development risk, flight-test cost, and hardware damage probability while accelerating system maturity.